
A Generalization of Transformer Networks to Graphs
Published:
A Generalization of Transformer Networks to Graphs (GT) [AAAI 2021]
- 研究背景、现有的方法存在什么问题?
最初的Transformer是为NLP设计的,其中的self-attention会计算一个句子中两两word之间的注意力。在这种架构下,由于Graph上的拓扑结构信息很重要,如果拓扑信息没有编码到节点表征中时,直接两两计算节点间的注意力往往会表现的很差。
- 研究的是在什么场景下的什么问题?
如文章标题一样,本文并未限定具体的任务场景。本文做了Graph Regression、Node Classification两大类任务。
- 如何解决这个问题的?为什么要这么解决(动机Motivation)
(也就是说我们不应该计算所有节点之间的两两注意力,而是更应该关注节点的邻居)。除此以外,想要直接在图上应用原始Transformer里的PE是困难的,因为在原始Transformer(也就是Attention is All You Need)里的PE可以保证每个单词具有唯一的位置表示,但是图上节点间的连接具有对称性,所以要设计能够得到节点唯一位置表示的PE是困难的(所以应该换一种PE)。
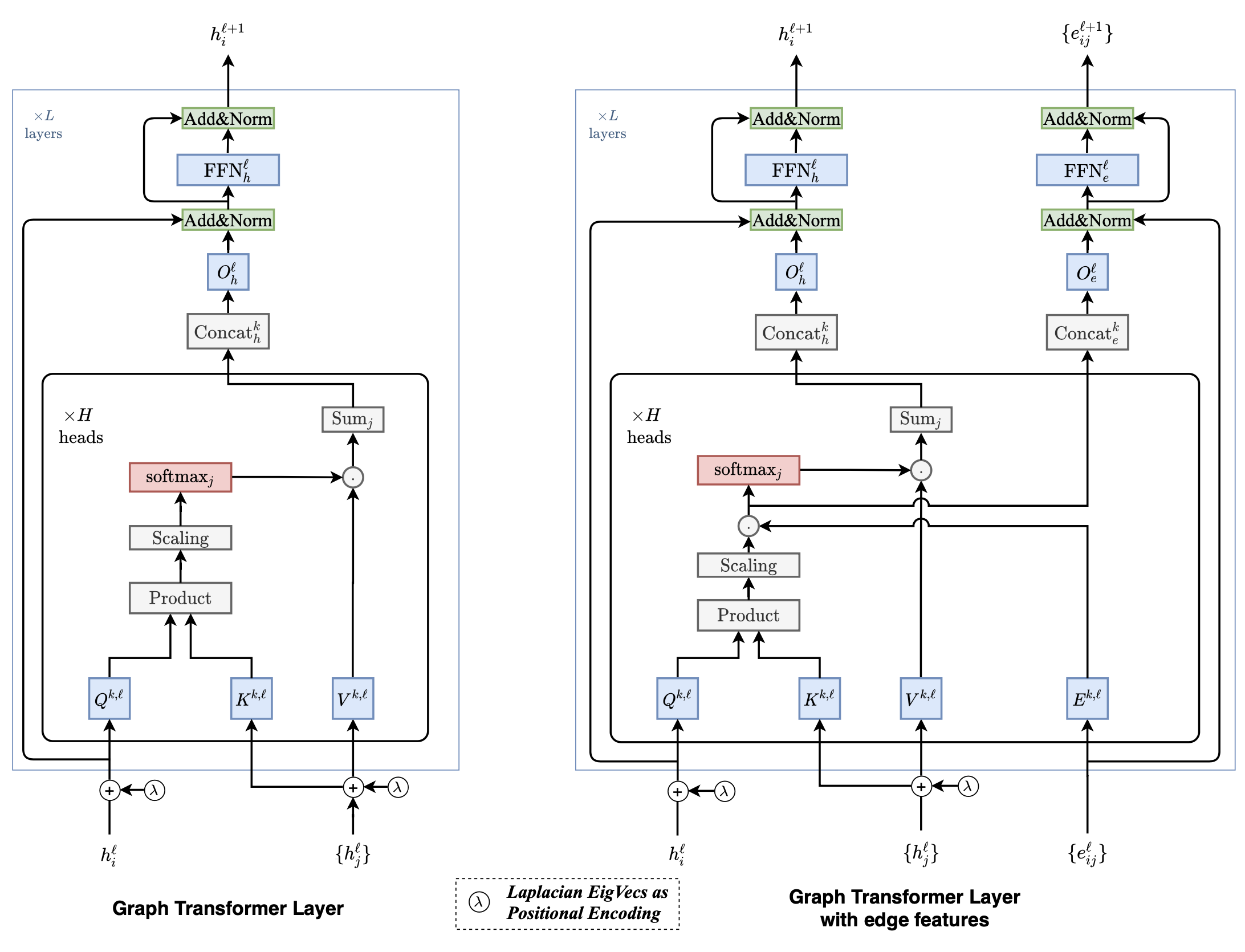
① attention机制只关注节点的邻居 ② 用拉普拉斯特征向量来表示位置编码PE ③ 用batch norm代替layer norm —>训练的更快、泛化性更强 ④ 并将提出的模型扩展到了边表征上,可以兼容节点表征和边表征(边表征在化学分子预测、知识图谱的实体预测上很重要)
- 好不好?新方法有什么问题?
① 在Graph上使用局部自注意力机制是自然的,因为节点应该更多关心与其相连的邻居,而并非全局的所有节点。相较于global, 使用Local自注意力机制减少了计算量,能更有效的捕捉节点之间的局部依赖关系,且解释起来也是很自然的。但是使用local,在全局性的任务上会有一定的弱化,难以从整体理解图的结构和语义,也难以捕获长距离的依赖。
②用Laplacian 特征向量来表示PE的理由是什么?在图信号处理中,拉普拉斯矩阵的特征向量(也叫谱特征向量)就是用来表示节点的位置信息的,提供了节点在图中的相对位置和连接关系。通过使用拉普拉斯矩阵的特征向量,可以将节点映射到低维空间,从而实现图的降维和表示。所以使用拉普拉斯矩阵的特征向量能保证每个节点的PE都是唯一的吗?
③batch norm和layer norm。BN可以并行、LN只能顺序执行。
④引入egde feature
特别的地方:
- 使用节点的最小的k个non-trival 特征向量(非平凡特征向量就是对应于非零特征值的特征向量)作为该节点的位置编码。
- 节点表征h + 位置编码λ 之后再送入Transformer
- 不需要计算两两节点间的注意力,只需要计算该节点和其邻居之间的注意力
- 预先计算数据集中所有图的拉普拉斯矩阵的特征向量
- 还能融合edge feature